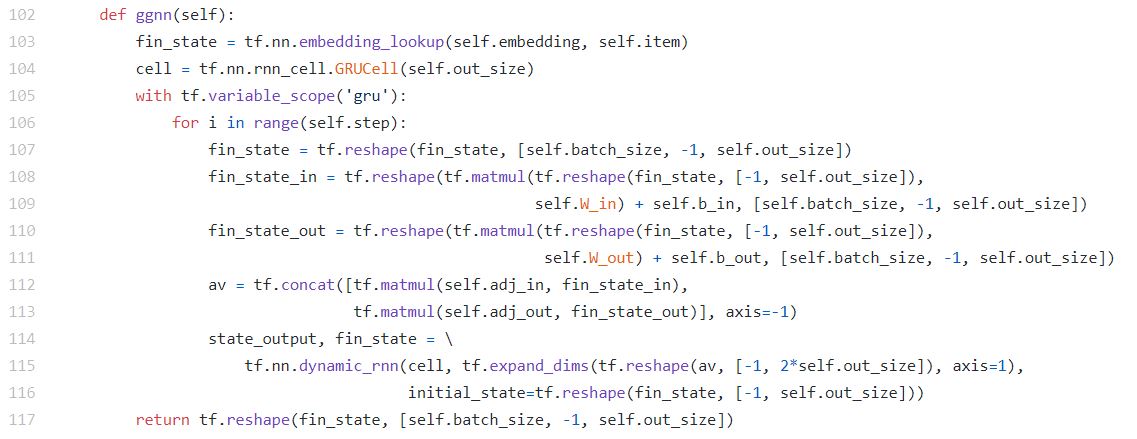
In ggnn function, the input shape of dynamic_rnn will be (self.batch_size * max_n_node, 1, 2 * hidden_size) = (# of all items in a batch, 1, 2 * hidden_size) and initial states' shape will be (self.batch_size * max_n_node, hidden_size) = (# of all items in a batch, hidden_size).
So there's only one time step for each sequence (the second element max_time in inputs = 1), which mean the first item vector in inputs (shape = (2 * hidden_size,)) will get the embedding after interacting with the first initial hidden state (shape = ( hidden_size,)) in only one time step. And for the second item vector in inputs will also get it's embedding with the second initial hidden state in one time step. Is that right ? If so, then there is no recurrent meaning in this RNN ?
Cause in my understanding, item should be fed into RNN time step by time step for a session, which means the hidden state (embedding) will be affected by the previous click item. I wonder why the inputs shape is (# of all items in a batch, 1, 2 * hidden_size) instead of (self.batch_size, max_n_node, 2 * hidden_size). What is the meaning of this setting in dynamic_rnn function ?
In ggnn function, the input shape of dynamic_rnn will be
(self.batch_size * max_n_node, 1, 2 * hidden_size)=(# of all items in a batch, 1, 2 * hidden_size)and initial states' shape will be(self.batch_size * max_n_node, hidden_size)=(# of all items in a batch, hidden_size).So there's only one time step for each sequence (the second element
max_timein inputs = 1), which mean the first item vector in inputs (shape = (2 * hidden_size,)) will get the embedding after interacting with the first initial hidden state (shape = ( hidden_size,)) in only one time step. And for the second item vector in inputs will also get it's embedding with the second initial hidden state in one time step. Is that right ? If so, then there is no recurrent meaning in this RNN ?Cause in my understanding, item should be fed into RNN time step by time step for a session, which means the hidden state (embedding) will be affected by the previous click item. I wonder why the inputs shape is
(# of all items in a batch, 1, 2 * hidden_size)instead of(self.batch_size, max_n_node, 2 * hidden_size). What is the meaning of this setting in dynamic_rnn function ?